
There is simplest version of this work without HTTP Support here : https://snap.berkeley.edu/snap/snap.html#present:Username=gist&ProjectName=ThymioSNAP&editMode&noRun
The main goal of this project is to provide an access to the Thymio(s) from the Berkeley Snap!, Scratch+++ like programming langage. This is a javascript node-based application that create an ws:// access to the thymio-device-manager running under Thymio Suite 2.x and provide an HTTP REST simple API to control the Thymio(s).
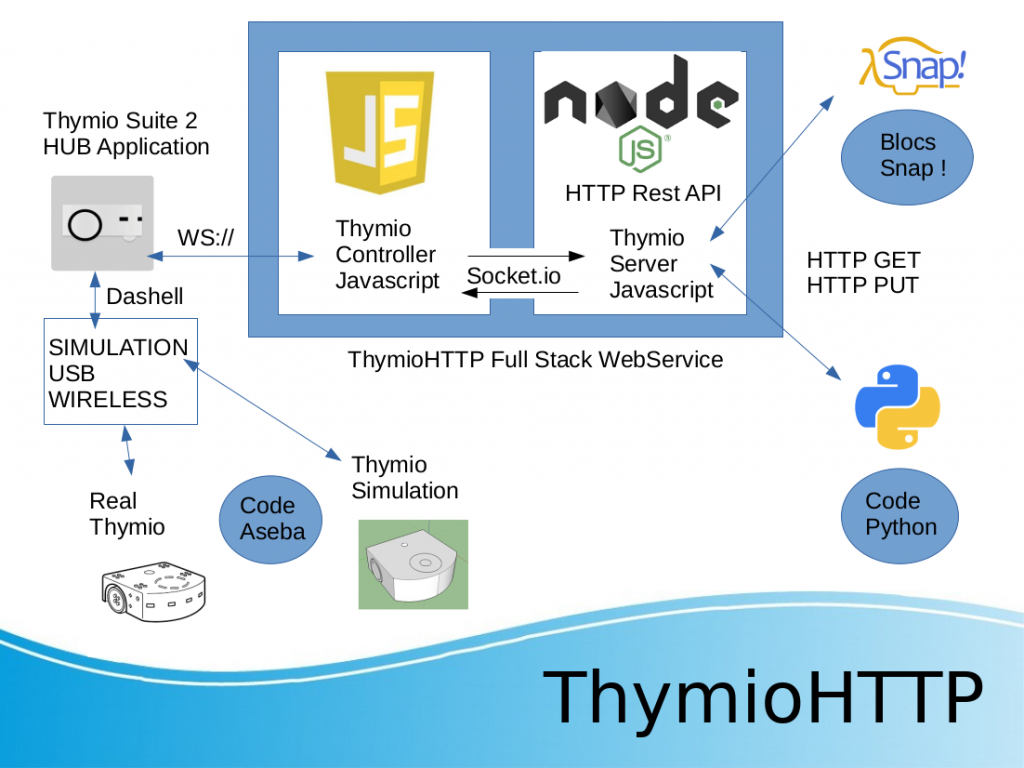
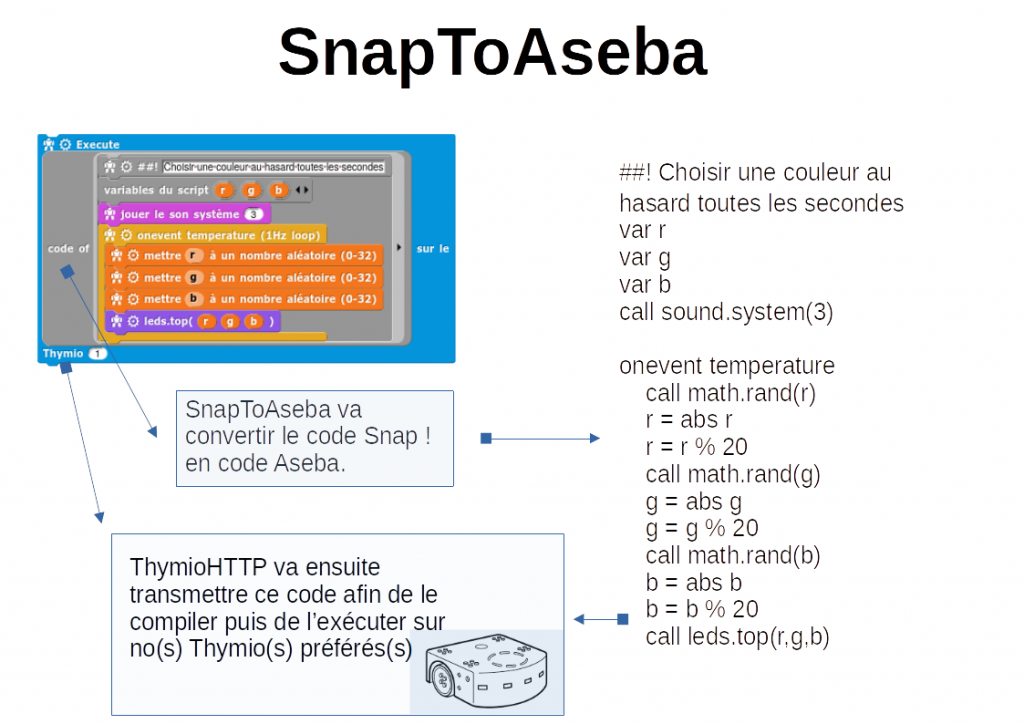
Because we want the Thymio to be as indépendant as possible from Wireless or USB, we created SnapToAseba, a codification tool that convert Thymio Snap! code to Aseba code and run it on the Real device :
Get thymioHTTP here : https://github.com/habib256/thymioHTTP